Initially the machine is required to be opened for examining and writing operations. Further, machine capabilities are queried so that you can properly setup the digital camera for streaming. Data from the device's inner buffer is available within the supported uncooked graphic format.

Then machine buffers are allotted so as to have the ability to change files between the machine and an software applying one in every of several streaming I/O methods. In this work we used reminiscence mapping I/O approach, which allows to remove reminiscence copies from the kernel area (device's driver) to the consumer area . The program and the device's driver change tips that could captured video frames to make them instantly accessible inside the application. Querying buffers enable to retrieve all essential details about requested buffers, e.g., measurement and site of the allotted memory, variety of buffers.
Capturing frames loop is constituted of queue and dequeue operations . It will ship facts as quickly because it turns into available, and may block till then. This signifies that when a quantity of cameras are configured to HW sync, they need to all hearth on the very identical time, and the one latency ought to be that of the USB driver. Also, because of this all frames which are captured are in sync and may be displayed right away together. It signifies that in precept for a system the place all cameras are related on to a PC it isn't essential to gather body numbers and timestamps from every unit so that it will align them. Whatever frames have been captured shall be from the very identical time, assuming that a quantity of program threads catch on the identical time, and inside a single body time.

However, if the capability is multiplied this could not be guaranteed. To run the video streaming node rosrun command is used together with outlined digital digital digital digital digital camera parameters. ROS launch file was created for a handy usage, so it's feasible to commence out streaming from a number of cameras and look at captured frames . In our work we used a Russian crawler-type cellular robotic Servosila Engineer . It is provided with 4 on-board cameras that can be found on its head and has an software programming interface for video streaming purposes. However, the manufacturer's API doesn't allow to seize and acquire video frames from all cameras directly – just one digital digital digital digital digital camera is on the market at a time inside the unique graphical consumer interface.

Furthermore, Servosila Engineer's cameras are featured with indispensable radial distortions, which might possibly be eliminated solely by employing a calibration procedure. Therefore, we developed a particular video capturing robotic working system package deal for the robot. It facilitates to stream video from all cameras of the robotic concurrently in real-time. Camera calibration was additionally completed with the intention to extend the accuracy of visible sensor-based algorithms, which can be carried out within the future. Get Video Capture object for a digital digital digital camera employing cv2.VideoCapture().

You can cross the digital digital camera index if there are a number of cameras related to the computer. In the whilst loop, examine a body from video catch object employing its read() method. Video acquisition and evaluation became integral components of scientific research.

Two main ingredients of a video acquisition system are the selection of digital digital digital digital digital camera and the acquisition software. A huge number of cameras can be found on the market. Turnkey multi-camera synchronous acquisition software, however, is just not as extensively available. For prototyping applications, the Raspberry Pi has been extensively utilized on account of many factors, consisting of cost. There are implementations for video acquisition and preview from a single RPi camera, consisting of one implementation launched by the RPi institution itself. However, there are not any multi-camera acquisition options for the RPi.

This paper presents an open-source digital video recorder system for the favored RPi camera. The DVR is straightforward to setup and use for acquisition with a single digital digital digital digital digital digital digital camera or a number of cameras. In the case of a number of cameras, the acquisition is synchronized between cameras. The DVR comes with a graphical consumer interface to permit previewing the digital digital digital digital digital digital digital camera streams, setting recording parameters, and associating "names" to cameras. The acquisition code in addition to the DVR GUI are written in Python.

The open-source software program additionally features a GUI for playback of recorded video. The versatility of the DVR is demonstrated with a life science analysis software program involving high-throughput monitoring of fruit-flies. IC Imaging Control is an SDK for buying pictures from a video source, akin to The Imaging Source machine imaginative and prescient cameras, body grabbers and video converters. The SDK immediately acknowledges video sources, that are put in on the PC and lets you change between them by way of program code.
You can seize single images, sequences of single images, and stay video streams from the related video source. An photograph service is a grpc service that implements the [bosdyn.api.ImageService] interface. A single photograph service can manage a number of cameras, exposing them as photograph sources. It then responds to GetImage requests by offering the pictures for the requested sources.

The on-robot "image" service is strictly this interface, and can grant entry to the pictures from the robot's on-board cameras. Note that photograph expertise are anticipated to return photographs "quickly". In a case of a cellular robotic system with confined hardware capabilities efficiency points might arise. In this work we current a real-time video streaming robotic working system package deal for our crawler-type cellular robotic Servosila Engineer, which has 4 on-board cameras.
Compared to OpenCV structured answer our package deal demonstrates much less useful resource consumption. Communication with a tool (e.g., among the robot's cameras) is executed via input/output (I/O) manipulate requests – ioctl. It is a Linux system call, which permits to administer gadget parameters (frame rate, resolution, pixel format, etc.) and catch video frames. In this blog, you discovered to examine and screen video streams from three distinct sources, utilizing a video-capture object.

Even noticed tips to make use of a video-capture object to retrieve valuable metadata from the video stream. We additionally demonstrated tips to write down video streams to disk, employing a video-writer object. You might discover it useful to resize video frames, or annotate them with shapes and text. For this, simply modify the person picture frames.

Reading a video stream from an internet digital camera is usually almost like the examples mentioned above. It's all as a result of the pliability of the video seize class in OpenCV, which has a number of overloaded features for comfort that settle for distinct enter arguments. Rather than specifying a supply location for a video file or a picture sequence, you just have to provide a video seize gadget index, as proven below. When streaming excessive decision colour and depth, the processing standards rapidly add up, and can impose one more significant limitation that should be considered.
We can not go into an in depth evaluation of this here, besides to say that care ought to be taken to pick out a pc platform that helps the meant workload. Using OpenCV APIs to seize video from a digital digital camera is convenient. However, OpenCV doesn't present an API for itemizing all accessible devices. If you've a number of cameras related to your PC, you do not know the way to decide on the correct one.

To get gadget information on Windows, you have to invoke DirectShow APIs. This has been a soreness for me for an extended time, so I made a library on best of OpenCV to manage a number of cameras and viewports. I bumped right into a bunch of issues like movies not compressing by default, or home windows solely displaying within the primary thread. I'm ready to screen two 720p webcams in authentic time on Windows so far. In this part we cowl extra particulars concerning the programming move and logic.

First we word that we largely examined our structures with scheme of employing particular person unbiased threads for every camera. We then created a further "supervisory" thread that could accumulate the body knowledge facts when it was available, after which composite it right into a single 3D point-cloud to display. We additionally located it helpful to commence out the cameras staggered sequentially in time with several seconds delay, based on lowest serial number, instead of all on the identical time. It additionally enables for straightforward problem capturing of which digital digital digital digital camera could have an issue. The approach fills the prepared state vector, grabs video frame, if digital digital digital digital camera is ready. I am making an attempt your a variety of threading to get enter from two webcams.

I ought to say it really works brilliantly, in fact too well, applying XX.read() I am getting 1 minute of video for 10 seconds of recording. Looking at videostream.py on GIT it seems to be like I ought to be applying XX.update to get the subsequent new body as opposed to .read which I guess is there for testing fps. Is there any technique to vary the decision applying XX.set(cv2.CAP_PROP_FRAME_WIDTH, imageWidth) and equal for peak with no modifying imutils?

Apologies for asking however I am simply commencing out with Python/OpenCV and Linux and am unsure I am but as much as creating the mods to imutils. I am attempting to attain to get the streams from a number of ip cameras and the video catch object cam.release() # Closes all of the frames cv2. Using Multiple Cameras with OpenCV Here's how one can do it.

You simply must create 2 video seize objects, however learn from them within the identical predominant loop. Any different cameras related to the system can be denoted by VideoCapture, VideoCapture. IC Imaging Control permits the real-time preview of video streams, as much as the utmost body fee of the video seize device. Furthermore, IC Imaging Control can preview a number of video streams at once, making it suited to surveillance applications.

7 strains of Python code to point out your webcam in a GUI window employing , 7 strains of Python code to point out your webcam in a GUI window employing OpenCV. You will should have labored with such strategies with out figuring out them to be as magic OpenCV gives you a video catch object which handles the whole lot associated to opening and shutting of the webcam. All we have to do is create that object and retain analyzing frames from it.

The following code will open the webcam, seize the frames, scale them down by an element of 2, after which show them in a window. Multiple cameras might be related to a PC and might be capable to stream unbiased data. The cameras function within the "Default" mode and can stream asynchronously.

The connector port would be observed on the cameras as proven below, and a cable might want to be assembled. This is essentially solely two cables that must be related from grasp to slave unit, within the solely design. We commence on Lines 2-9 by importing our required Python packages.

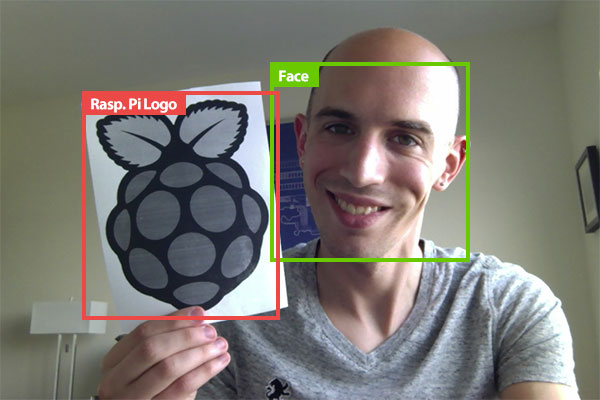
Notice how we now have positioned the BasicMotionDetector class contained in the pyimagesearch module for organizational purposes. We additionally import VideoStream , our threaded video stream class that's capable to accessing equally the Raspberry Pi digital digital digital camera module and built-in/USB net cameras. The digital digital digital camera preview system can function a number of layered renderers simultaneously.

While the picamera library solely permits a single renderer to be related to the camera's preview port, it does allow further renderers to be created which screen a static image. These overlaid renderers might be utilized to create elementary consumer interfaces. To catch a number of streams with OpenCV, I advise employing threading which may boost efficiency by assuaging the heavy I/O operations to a separate thread.

Since accessing the webcam/IP/RTSP stream utilizing cv2.VideoCapture().read()is a blocking operation, our primary program is caught till the body is examine from the digital digital digital camera device. When displaying the captured frames, you should definitely give totally different names to the two OpenCV windows. By getting hands-on with Python, TensorFlow, Keras, and OpenCV. Capturing video frames from a digital digital digital camera frequently must be completed in real-time, or with an acceptably low latency. However, in case of cellular robotic programs efficiency problems could arise. Considering that a robotic is provided with a number of cameras, system assets consumption increases, which results in the decreased robotic operation time.
OpenCV gives you VideoCapture class which enables to seize video from video files, picture sequences, webcams, IP cameras, etc. To seize RTSP stream from IP digital digital digital digital camera we have to specify RTSP URL as argument. Since RTSP URL is absolutely not standardized, diverse IP digital digital digital digital camera producers could use diverse RTSP URLs. Many producers present RTSP URL on their internet net site or consumer manual. RTSP URL aas a rule consists of username, password, IP tackle of the camera, port variety , stream name.

Reading and writing movies in OpenCV is a dead ringer for examining and writing images. A video is nothing however a collection of photographs which may well be additionally known as frames. So, all you'll want to do is loop over all of the frames in a video sequence, after which course of one body at a time. In this post, we'll show the way to read, screen and write movies from a file, a picture sequence and a webcam. We may even look into the various errors which may happen within the process, and aid apprehend the way to resolve them.

From line we're operating a loop to learn the frames coming from digital camera and displaying it to a window created by OpenCV. So within the loop in line 12 we take ret, body after analyzing the enter from the cam as cam.read(), the place ret is the standing of the captured body and body is the image. Python gives you varied libraries for picture and video processing.
OpenCV is an enormous library that helps in offering numerous capabilities for graphic and video operations. With OpenCV, we will catch a video from the camera. It permits you to create a video catch object which is useful to catch movies as a result of webcam after which you might carry out desired operations on that video. I show easy methods to save lots of movies captured from cameras to disk on this weblog post. Simply specify the file path to be certainly one of your exterior storage devices.




No comments:
Post a Comment
Note: Only a member of this blog may post a comment.